



福祉ロボット工学チーム
機械工学、電気工学、電子工学、情報工学の知識・技術を融合させることにより、従来手法を越える新たな工学的解を生み出す学問であるメカトロニクスについて学びます 。
講師河田 淳治
 研究テーマ
研究テーマ
-
AI福祉介護ロボットの開発
 研究概要
研究概要
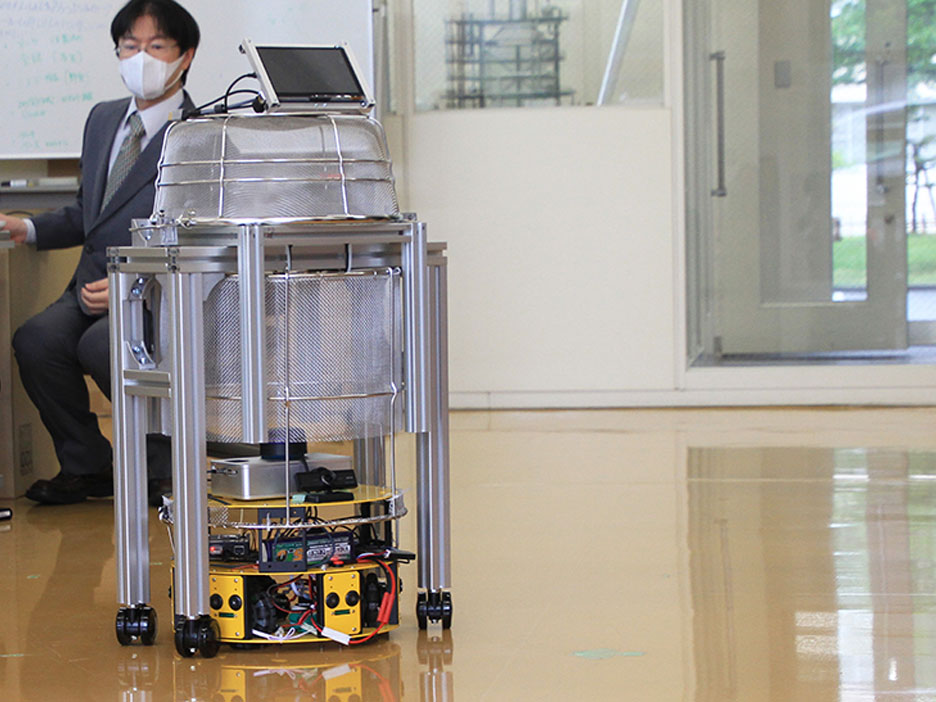


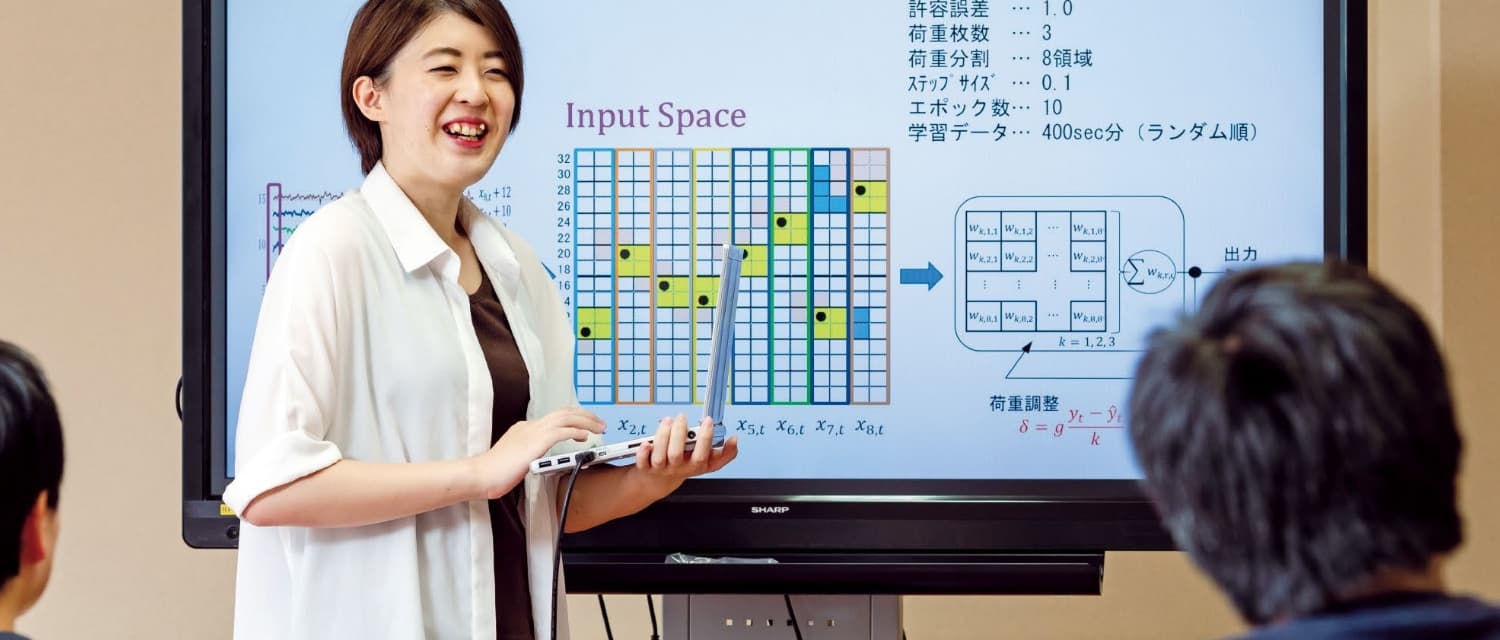
現在、福祉介護施設では、深刻な人員不足により顧客全員に目が行き届かない時間帯があったり、アクシデントと呼ばれる突発的な問題への対応が困難となっている。さらに人的ミスの発生も危惧されている。これからの日本は少子高齢化が進み、人員不足が解消される可能性は低く、福祉介護分野だけでなく様々な分野において知能ロボットの需要はますます高くなると考えられる。本研究では、福祉介護施設のスタッフに対して実施したアンケートを基にニーズを分析し、特に需要の多かった転倒などの危険予測機能や体調管理などのリスク管理機能、表情や動作などのモニタリング・分析機能、コミュニケーション機能(顔認証、声かけ)を有する知能ロボットの開発を行う。
 講師の紹介
講師の紹介
講師河田 淳治
担当授業
- 電気基礎
- メカトロニクスA
- メカトロニクスB
- 微分積分学
- 応用機械電子工学Ⅰ
- 応用機械電子工学Ⅱ
- 機械工学実験C
- 卒業研究
-
研究専門分野
回路シミュレーション
カオス工学
メカトロニクス -
研究室名
福祉ロボット工学チーム
-
経歴・学歴
1990年3月
徳島大学 工学部電気工学科 卒業 1992年3月
徳島大学大学院 工学研究科電気工学専攻 修了 1992年4月
徳島文理大学 工学部 助手兼事務職員 2002年4月
徳島文理大学 工学部機械電子工学科 講師 2010年4月
徳島文理大学 理工学部機械創造工学科 講師 2018年4月
徳島文理大学 理工学部電子情報工学科 講師 2018年4月
徳島文理大学 理工学部 電子情報工学科 教授 -
論文・著書等
①Analysis of Chua's Circuit with Transmission Line (1997.6) ②On the Influence of Transmission Line on Communication System Using Chaos Synchronization (1998.8) ③Performance Comparison of Communication Systems Using Chaos Synchronization (1999.7) ④BER Estimation of a Chaos Communication System Including Modulation-Demodulation Circuits (2000.3) ⑤Synchronization Phenomena and Its Analysis in Chaotic Systems Coupled by Transmission Line (2001.12) ⑥A Reduction Technique for RLCG Interconnects Using Least Squares Method (2005.2) ⑦Spice-Oriented Frequency-Domain Analysis of Nonlinear Electronic Circuits (2007.2) ⑧Sensitivity Analysis and Optimization Algorithm -- Based on Nonlinear Programming --(2008.9)
-
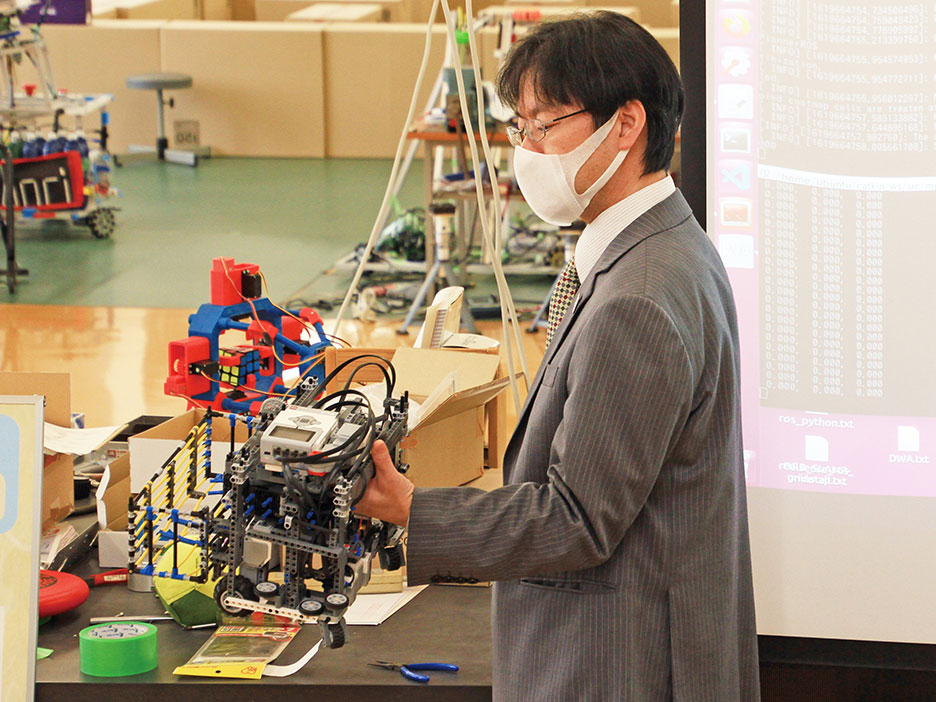
主な卒業研究
【2017】 競技ロボット(ディスク射出ロボット)の改良,競技ロボット(スローイングロボット,キャリーイングロボット)の製作 【2016】 センサーによる位置情報競技ロボット(ハイブリッドロボット)の改良,競技ロボット(ディスク射出ロボット)の製作取得システム 【2015】 競技ロボット(バドミントンロボット)の改良,競技ロボット(ハイブリッドロボット)の製作
中高生への
メッセージ
今まではロボコン用の競技ロボットの製作を中心に行ってきましたが、今後は福祉介護ロボットや、AI(機械学習、深層学習)、IoT技術を応用したシステムの開発などを中心に行う予定です。
電子情報工学科









